Integration of Wifi and Inertial Navigation Systems
| ✅ Paper Type: Free Essay | ✅ Subject: Physics |
| ✅ Wordcount: 1425 words | ✅ Published: 01 Feb 2018 |
Advanced Integration of Wifi and Inertial Navigation Systems For Indoor Mobile Positioning
- Mohamad Zakwan Bin Zulkifle
Abstract
Advanced Integration of Wifi and Inertial Navigation Systems For Indoor Mobile Positioning have been widely use with the development of the technology nowadays. This paper represents about the study of how the advanced integration of wifi and inertial navigation system for mobile indoor positioning works. Also, this article present about an indoor positioning and orientation system, which optimize the user mobility in closed spaces. This technology employs a location codes system. It is a simple and inexpensive solution to obtain the indoor location and orientation. Thus, make the user easy to navigate indoor without hesitation and many device to carry on with them.
Materials and Methods
In inertial navigation systems, localization/introduction estimation is source-independent. The client’s position is figured in connection to a known beginning position utilizing a dead reckoning algorithm. The entire system makes utilization of the previously mentioned sensors: accelerometers are utilized to figure the distance travelled and the gyroscopes/magnetic compass to focus the direction. The uncertainty in the evaluated position develops with time from the initial known beginning position since the errors presented by assessing the user/object movements are additive, expanding the total inaccuracy. This requests for an occasional recalibration of the systems to decrease the cumulative error.
The idea of solid inner position (see Figure 1 for premise framework construction modeling) concerning restriction in all surroundings. Typically, it needs a different sensors, positioning stands with alternate signal, movement sensor, and natural attributes.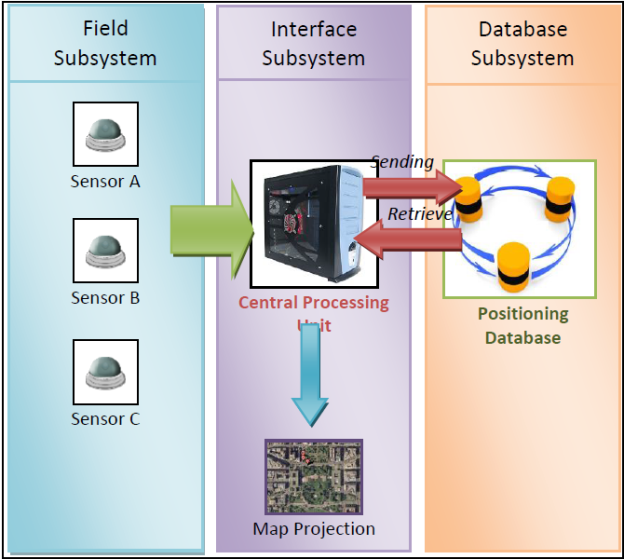
Figure 1. Fundamental System Architecture of Robust Indoor Positioning on Mobile Sensing Platform
This can increment by utilizing three-dimensional (3d) mapping, setting awareness and participation between users. Constancy is amplified by harvesting. However much data from the nature as could be expected and after that picks the most dependable characters for deciding the position. As indicated by Figure 1, a sound framework, a closed position by and large comprise of three (3) sub framework, called subsystems field, subsystem interfaces, and database subsystem. Under ordinary conditions, the transmitter will dependably proceed distribute their signs in scope. Any gadget which is outfitted with exceptional sensors inside extent they will get signals. The sign got by then will be transformed by a focal handling unit (where the calculation introduced position), before it is contrasted and estimation information in information source. At last, the yield mapping the framework shows area on the screen of a cell phone.
To estimate location in a cellular network, it can be used successfully by several techniques which are :
- Wireless Local Area Networks (WLANs)
- Bluetooth
- Ultra-wideband (UWB)
- Ultrasound
- Radio Frequency Identification (RFID)
- Hybrid Technologies
- QR scanning method
To explore on indoor situations, it is important to have all the indoor space data at one time handled, to compute all conceivable courses. Contingent upon the degree of the earth, or the intricacy of these, there will be pretty much area labels that relate to the position of the marks. Those area marks will be deliberately dispersed everywhere, when the client filters any area tag, the frameworks will demonstrate their current position and will manage him/her regulated to their destinations. This system lives up to expectations with any cell phone or tablet, regardless of the fact that the cell phone have any cam, just by entering the URL which shows up other than the QR code.
Expected Outcomes
Outcomes expected from this is :
- The advanced integration of wifi and internal navigation systems for indoor mobile positioning full have been use as the technology have been applied widely in our daily life along with the advancement in this globalization era.
- The advantage and effectiveness of utilizing the floor arrangement based vision route systems to enhance the indoor positioning accuracy and unwavering quality. These proposed systems can give satisfactory indoor positions in different situations with incredible performance consistency.
- The intial position exactness is critical to focus the region of interest. Incorporating sensors, for example, accelerometer, gyrocsope will essentially enhances the current starting position exactness by Wi-Fi, which is several meters. Precision of initial positions won’t just quicken the matching speed additionally enhance the matching dependability.
- Our pedometer calculation can be consolidated with sense of self movement from the smartphone camera to yield a more precise dead reckoning system. The main concern is that the preview frames would be slightly obscured when users begin their walk. Picture adjustment calculations exist that can fix this issue up to a certain extent.
Research Timetables : Milestone
|
Milestones |
Task |
Status |
|
Students have been assists with Supervisor |
The scope of the topic have been given to the student Student need to find the study/topics that are suitable for the scope given |
Done |
|
Students develop and find the journal that need to be studied |
Find the journal need that are suitable for the scope and topics given Skimming and highlighted the main points |
Done |
|
Students working on the assignment research report |
Drafting the assignment research report |
Done |
|
Students meet regularly with the Supervisor |
Consult with Supervisor if there problem Consult with Supervisor for further explanation |
Done |
|
Prepare for the first submission (14 NOVEMBER 2014) |
Students need to submit the first submission Students need to submits the:
|
Assignment research report via GOALS through software called Turnitin Done |
|
Students working on the assignment research proposal |
Drafting the assignment research proposal |
Done |
|
Students meet regularly with the Supervisor |
Consult with Supervisor if there problem Consult with Supervisor for further explanation |
Done |
|
Prepare for the second submission (30 NOVEMBER 2014) |
Students need to submit the second submission which is the last submission for this assignment proposal Students need to submits the :
|
Assignment research report via GOALS through software called Turnitin Done |
|
ACTIVITY |
|||||||||||
|
WEEKS |
|||||||||||
|
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
||
|
Find Topics and Journal |
|||||||||||
|
Skimming Journal |
|||||||||||
|
Drafting for Assignment Proposal |
|||||||||||
|
Cover Page |
|||||||||||
|
Introduction |
|||||||||||
|
Literature Review |
|||||||||||
|
First Submission (14/11/2014) |
|||||||||||
|
Table of Contents |
|||||||||||
|
Abstract |
|||||||||||
|
Material and Methods |
|||||||||||
|
Research Timetable: Milestone |
|||||||||||
|
Expected Outcomes |
|||||||||||
|
Conclusion: Significance of the Study |
|||||||||||
|
References |
|||||||||||
|
Drafting for Assignment Proposal |
|||||||||||
|
Second Submission (30/11/2014) |
|||||||||||
Conclusion: Significance of the Study
Advanced Integration of Wifi and Inertial Navigation Systems For Indoor Mobile Positioning is vigorously developing technology that are being implanted in many subjects. This advancement of technology is a glory for nowadays technology. With the advancement, people nowadays can plan their path and their shopping style smoothly. They don’t have to be stress if they accidentally overshoot the place they want to layover because they can plan it before they begin their walk. Because of this, the indoor positioning system by using the WLAN and FM Radio function inside a cellular telephone has been proposed, since the cell phone is an individual gadget which is utilized by the vast majority. The posotioning method was exchanged focused around sort of environment so as to guarantee the robustness of the indoor positioning system.
Reference
- Oliver Woodman. Pedestrian localisation for indoor environments. PhD thesis, St Catharines College, 2010.
- L. Escobés, “Summary of the State of the Art in indoor location systems,” no. December, pp. 1–3, 2009.
- U. Rueppel and K. Stuebbe, “BIM-Based Indoor-Emergency- Navigation-System for Complex Buildings,” Tsinghua Science & Technology, vol. 13, no. October, pp. 362–367, Oct. 2008.
- H. M. Khoury and V. R. Kamat, “Evaluation of position tracking technologies for user localization in indoor construction environments,” Automation in Construction, vol. 18, no. 4, pp. 444–457, Jul. 2009.
- Abhijit Chandgadkar, An Indoor Navigation System For Smartphones, June 18, 2013.
- Bei Huang, Floor Plan Based Indoor Vision Navigation Using Smart Device, July 2013
- Marzieh Jalal Abadi, Luca Luceri, Mahbub Hassan, Chun Tung Chou, Monica Nicoli, A Collaborative Approach to Heading Estimationfor Smartphone-based PDR Indoor Localisation.
- Wan Mohd Yaakob Wan Bejuri and Mohd Murtadha Mohamad, Wireless LAN/FM Radio-based Robust Mobile Indoor Positioning: An Initial Outcome, International Journal of Software Engineering and Its Applications Vol.8, No.2 (2014), pp.313-324
- José Antonio Puértolas Montañés, Adriana Mendoza Rodríguez, Iván Sanz Prieto, Smart Indoor Positioning/Location and Navigation: A Lightweight Approach,2013
- Yuan Xu, Xiyuan Chen and Qinghua Li, Autonomous Integrated Navigation for Indoor Robots Utilizing On-Line Iterated Extended Rauch-Tung-Striebel Smoothing,2013
- Oliver J. Woodman, An introduction to inertial navigation, August 2007.
- Hui Wang, Henning Lenz, Andrei Szabo, Joachim Bamberger and Uwe D. Hanebeck, Enhancing the Map Usage for Indoor Location-Aware Systems.
- Nisarg Kothari, Balajee Kannan and M. Bernardine Dias, Robust Indoor Localization on a Commercial Smart-Phone, August, 2011.
- Jussi Collin, INDOOR POSITIONING SYSTEM USING ACCELEROMETRY AND HIGH ACCURACY HEADING SENSORS, September 9-12, 2003, The Institute of Navigation.
- Saurabh Taneja, Burcu Akinci, James H. Garrett, Lucio Soibelman, Bill East, BIM-BASED HYBRID INERTIAL POSITIONING FOR FACILITY OPERATIONS SUPPORT,Oktober 2011
[Type text]
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


DMCA / Removal Request
If you are the original writer of this essay and no longer wish to have your work published on UKEssays.com then please click the following link to email our support team:
Request essay removal