Example Physics Essay
| ✅ Paper Type: Free Essay | ✅ Subject: Physics |
| ✅ Wordcount: 1457 words | ✅ Published: 11 May 2018 |
The Motion of a Mass Spring System
The example of a mass attached to the end of a spring is a powerful tool in physics due to the fact that it is analogous to many physical phenomena. To be able to use this example to elegantly describe other more complex systems it is crucial to first fully understand how this simple system works itself.
The force acting on a mass attached to a spring at a given position is given by (Serway, 2003: 437).
F= -kx (Eqn 1)
This equation may be derived from Newton’s Second Law of motion, which states that the force on a mass is proportional to the rate of change in momentum.
A mass and spring system can be described as a Simple Harmonic Oscillator and there are some fundamental equations that govern the motion of such a system (Serway, 2003: 436).
ω= √(k/m) (Eqn 2)
Equation two shows how the angular frequency (ω=2π*frequency) of an object oscillating due to it being fixed to a spring that is inversely proportional to the mass of the object. k is a constant, known as the spring constant that is defined by the properties of the spring. k can be easily determined experimentally for a given spring by changing the mass attached to the spring and measuring the frequency. Due to the periodic nature of such a system as that which can be described using equations one and two, they are known to be in simple harmonic motion.
The motion of a particle over time is described effectively by a cosine wave (Serway, 2003: 436; Hayek , 2003; 562).
x(t)=Acos(ωt+Ï•) (Eqn 3)
Equation three shows how this motion can be mapped over time where A is the amplitude of the oscillation, and Ï• is a term to correct the phase. This can be plotted to show how the mass and spring system will move over time.
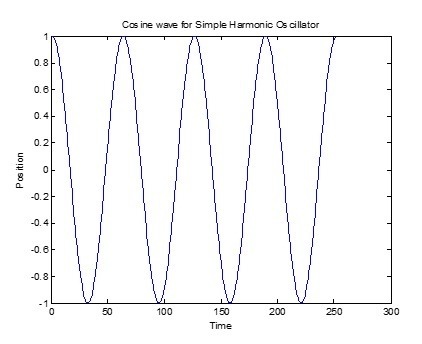
The figure above shows how a mass on a spring will behave in a frictionless universe while obeying Newton’s First Law of motion. A useful trait of the Simple Harmonic Oscillator is that the equations for the velocity and the acceleration are easily derived from that of the position equation (Serway, 2003: 436).
V(t)=-Aω.sinâ¡(ωt) (Eqn 4)
a(t)= -Aω² cosâ¡(ωt) (Eqn 5)
For brevity the phase term (Ï•) has been omitted from these two equations as it can be assumed that phase is the same. These two equations give valuable insight into the nature of as mass on a spring and how its velocity and acceleration is linked. The interesting thing to note is that velocity is governed by a sine waveform, yet acceleration is dependent on the cosine waveform. What this means is that when the particle on the spring has minimum velocity it will have maximum acceleration, it also means that when the mass is travelling at its maximum velocity it has minimum (possibly zero) acceleration.
Realistically however, most situations where a simple harmonic oscillator may be applied will involve a resistive force of some description, such as friction in the case of a mass on a spring. The effect this has on the motion of the mass and the spring system can be seen in the figure below.
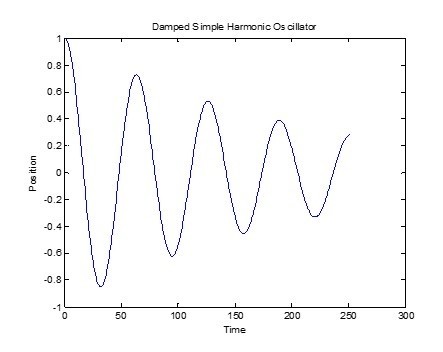
It is clear to see on the above figure that the presence of friction causes the amplitude of the oscillation to decay over time. This effect is known as damping. In a damped system that has no external force driving the oscillation itself, the rate at which the oscillation decreases is directly proportional to the resistive force being applied to it. The damping force is at its greatest when the particle is moving at its fastest velocity and at a minimum when the acceleration is at a maximum. There are three types of damping in an oscillatory system, underdamping, over-damping and critically damped. Underdamped is where the amplitude of the decay envelope does not decay rapidly. Critically damped systems are the fastest to return to equilibrium and will have a decay envelope that allows one oscillation over the entire damping period and will decay towards zero rapidly during this period. Over-damping occurs when there are no oscillations (as seen in critical damping) however there is an infinite time to return to equilibrium (Hayek , 2003; 567). The equation which describes this damped oscillation is given by:
F= -kx-l dx/dt (Eqn 6)
Here the original equation for the force is extended by a first order differential term relating to the change in the velocity due to the damping constant l. Equation six is able to be expanded into a more useful form by applying Newton’s Second Law, which gives:
(d² x)/(dt² )+2Dω_0 dx/dt+ω_0² x=0 (Eqn 7)
This equation now contains a first and second order differential equation relating to the velocity and acceleration respectively of the particle. Equation seven looks to be much more complex than that of equation six, however it is now in a considerably more useful form as it allows to see equation six in terms of the angular frequency of the system. D is the damping ratio and is given by D= l/(2√mk) , taking into account the damping coefficient, the spring constant and the mass of the particle.
To fully understand the motion of the mass and spring system there must be consideration of the energy within the system. This may be done with the help of some simple drawings. The blue lines indicate the spring and the solid red block with a blue border indicates the mass.
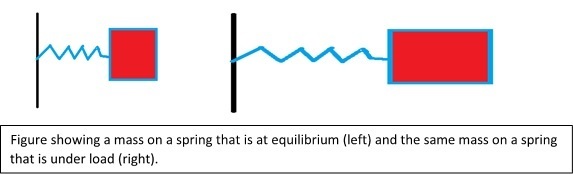
From the figures it is possible to imagine stretching the spring, this means that there is a force acting on the mass and if it is held at this stretched point (x) the mass will have a potential energy U. should the mass be released from this point it will have a maximum velocity Vmax and a maximum Kinetic energy KEmax. The total energy in the system at any one point in time is the sum of the potential and kinetic energies.
E(t)=KE+U (Eqn 8)
E(t)=1/2 m〖v(t)〗²+1/2 k〖x(t)〗² (Eqn 9)
By substituting the formulae for velocity and position (equations three and four) into the energy equation it is possible to simplify this further.
E(t)= 1/2 kA² [〖sinâ¡(ωt)〗²+〖cosâ¡(ωt)〗² ] (Eqn 10)
E(t)=1/2 kA² (Eqn 11)
The elegance of this simple algebra is that for an oscillating mass on a spring the energy in the system at any given point in time is completely independent of time. If there are dissipative or driving affects occurring during the oscillations then the amount of energy in the system will change, however for a closed system this fact holds true.
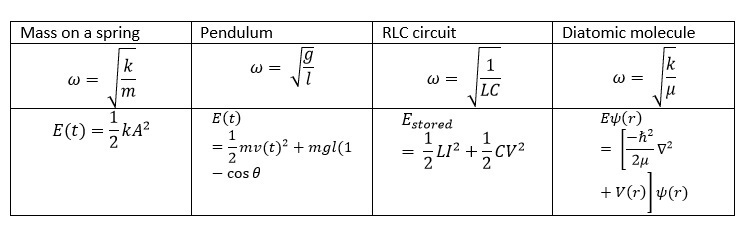
This equation occurs in many areas of physics, for much more complex systems than a single mass on a spring. These equations can be applied to pendulums, resonant electrical circuits (RLC circuits) (Mispelter, 2006: 35) such as those used to detect Radio and TV signals, or even in quantum mechanics and the time independent Schrodinger equation, where it is found that a quantum harmonic oscillator, such as a particle in a potential well (Schrödinger, 1926: 1054), is one of the few quantum mechanical problems that it is possible to find analytical answers for. If the Hamiltonian for such a system is examined it is shown that its structure is very similar to that of equation nine (Schrödinger, 1926: 1057; Levitt, 2012: 144).
H Ì‚= p Ì‚/2m+1/2 mω² x Ì‚² (Eqn 12)
p Ì‚ is the momentum operator that forms the kinetic half of the Hamiltonian and x Ì‚ is the position operator which calculates the potential part of the Hamiltonian (Schrödinger, 1926: 1052). It is obvious that the simple classical physics still applies to this quantum system.
These are some of the situations where this type of motion is observed and the table shows how the equations are manipulated to fit the system under examination ( Hayek , 2003; 562; Mispelter, 2006: 38; Dirac, 1958: 108; Boylsestad, 2010: 871).
In conclusion the mass and spring system’s motion is elegantly described by some simple mathematics that can be manipulated to suit systems that have external forces acting on the motion of the system. The beauty of this is that the mathematics can then be applied to much more complex systems.
References:
Boylestad, Robert. (2010) Intrductory Circuit Analysis, 12th edition. Pearson.
Dirac, P. A. M. (1958). The Principles of Quantum Mechanics, 4th edition. Oxford University Press
Hayek, S. I. 2003. Mechanical Vibration and Damping. Encyclopaedia of Applied Physics.
Levitt, M. (2012). Spin Dynamics, Basics of Nuclear Magnetic Resonance 2nd edition. John Wiley and Sons Ltd.
Mispelter, J. (2006) NMR probeheads for biophysical and biomedical experiments: theoretical principles & practical guidelines. Imperial College Press.
Schrödinger, E. (1926). “An Undulatory Theory of the Mechanics of Atoms and Molecules”. Phys. Rev. 28 (6) pp 1049-1070.
Serway, R. A., Jewett, J. W., & Serway, R. A. (n.d.). Physics for scientists and engineers, with modern physics. Belmont, CA: Thomson-Brooks/Cole.
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


DMCA / Removal Request
If you are the original writer of this essay and no longer wish to have your work published on UKEssays.com then please click the following link to email our support team:
Request essay removal