Frigg Field Case Study
| ✅ Paper Type: Free Essay | ✅ Subject: Engineering |
| ✅ Wordcount: 2691 words | ✅ Published: 11 Aug 2017 |
Since the first steel piled jacket foundation (SPJF) was installed in the North Sea in 1967 there has been a total of 556 installed and 52 have been decommissioned after operational use. The operational water depth of the North Sea varies as SPJF are split into small and large categories. Of the original 556 foundations 392 were installed in water depths of less than 55m leaving 164 foundations reaching to depths of 190m (Oil & Gas UK, 2012) (Offshore-mag, 2000).
With oil and gas reserves depleting in this area more and more installations are applying for cease of production (CoP) to begin the decommissioning cycle. It has been estimated that over the next 25 years there will be £35bn spent on decommissioning activity in the North Sea alone (Decom North Sea, 2014).
1.2 CASE STUDY – FRIGG FIELD
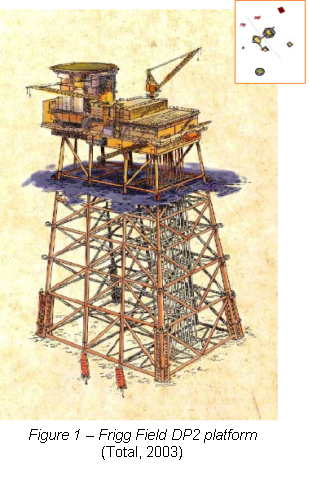 The Frigg Field is situated in the North Sea with 6 differing fixed foundation structures spread over UK and Norwegian blocks 10/1 and 25/1 respectively. These fixed foundations are a mixture of SPJF and Gravity Based Structures (GBS). For the remainder of this assignment the Frigg Field case study will only consider the cutting and removal of DP2 – an 8 leg SJPF which supported a drilling and production platform – Figure 2, (Total, 2003).
The Frigg Field is situated in the North Sea with 6 differing fixed foundation structures spread over UK and Norwegian blocks 10/1 and 25/1 respectively. These fixed foundations are a mixture of SPJF and Gravity Based Structures (GBS). For the remainder of this assignment the Frigg Field case study will only consider the cutting and removal of DP2 – an 8 leg SJPF which supported a drilling and production platform – Figure 2, (Total, 2003).
Key aspects of the Frigg Field DP2 to be considered are:
- Water depth 98m (321.5ft)
- Production depth 1850m (6070ft)
- 24 wells drilled in total for production
- 20 original steel pile foundations (4 external at each corner leg and 4 internal at inner legs) (T Gram, 2011) at 60″ diameter (Total, 2003)
- Jacket recovery via re-float technique after successful installation of buoyancy and cutting of foundations
In the North Sea, the selection of the ROV system is vital to its success of the cutting and removal of the DP2 jacket foundations. This is due to the ever-changing dynamic offshore environment that effect cutting, lifting and removal of subsea infrastructure.
2.1 ROV UNIT
The Oceaneering Millennium Plus (OMP) 220hp heavy work class ROV was selected for the cutting and removal of the Frigg DP2 foundations due to its operational capabilities. The ROVs working class design allows for front assembled dual manipulators to be interactive with the task in hand. Weighing in at 4,000kg the OMPs dimensions are 3.3×1.7×1.9m (LxWxH) (Oceaneering, 2017).
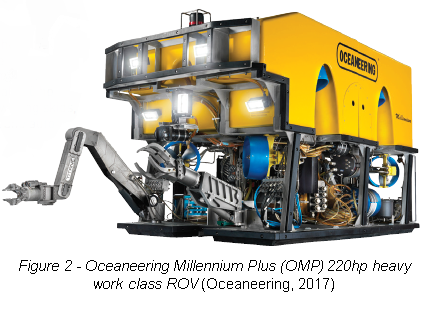 The depth capabilities of the ROV exceed the depth needed to fully operate in the North Sea conditions at the Frigg site as it is rated for up to depths of 3,000m. A main consideration of the OMP is its station keeping abilities and dual hydraulic units of 110hp powering 4 vectored horizontal and 4 vertical propulsion units. This allows for 2,000lbs of thrust to be used in the lateral, forward and reverse directions with a vertical thrust of 2,800lbs.
The depth capabilities of the ROV exceed the depth needed to fully operate in the North Sea conditions at the Frigg site as it is rated for up to depths of 3,000m. A main consideration of the OMP is its station keeping abilities and dual hydraulic units of 110hp powering 4 vectored horizontal and 4 vertical propulsion units. This allows for 2,000lbs of thrust to be used in the lateral, forward and reverse directions with a vertical thrust of 2,800lbs.
2.2 VISIBILITY & TOOL INTERACTION
Another main consideration of the ROV selected is its ability to interact clearly with tooling and structures at the water depth. This is made possible by the dual manipulators having 5 degrees of function which is powered by a 24V DC and 110V AC power supply on board. To successfully clear, cut and remove the 20 pile foundations the OMP is versatile enough to interact with heavy duty tools to do the jobs of dredging, cutting and use its manipulators to fit buoyancy cans within 15 mm tolerance for removal operations (Oceaneering, 2017) (Total, 2011).
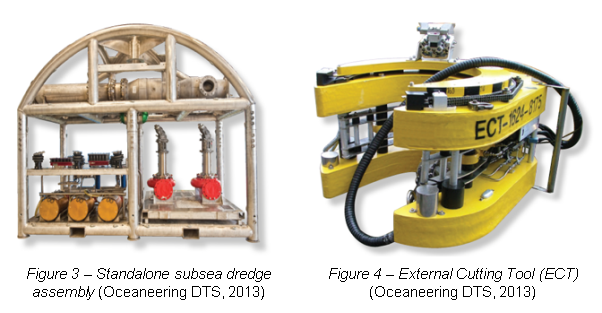
The OMP will be interacting with a standalone subsea dredge and an External Cutting Tool when at operational depths. But also has the ability to be fitted with various skid pans if needed. The ECT selected for the cutting operations of the pile foundations is an abrasive water jet cutting approach due to its multi-dimensional clamp configurations that allow for various diameters form 16″ – 72″ pipe to be cut.
This is made possible by 8 fully mounted 250W high intensity LED lighting units surrounding the front facing operating area working in conjunction with visuals. The visual output of the OMP comes from cameras which can either be standard, high or 3D high definition (HD) -Â 3D HD is preferred for the operations due to enhanced visuals allowing for a safer more efficient operation.
2.3 NAVIGATION
Automatic controls for the OMP are used via fly by wire systems that allow for station keeping regarding depth, pitch, altitude and automatic pre-programmed headings. To allow for the altitude and headings to be correct a surveying grade gyro and backup fluxgate compass is available on board the ROV. Depth of the ROV unit is vital due to the foundations being at seabed level and to avoid collisions with the seabed and/or cuttings pilings in the area (Oceaneering, 2017).
2.4 LAUNCH AND RECOVERY SYSTEM (LARS)
The adaptability of the OMP with regards to different LARS allows it to be used with multiple possible vessels when on site. There are various options available for the OMP: heavy weather over boarding, A-frame, cursor and heavy lift winching.
To safely and successfully launch and recover the OMP an A-frame system was selected. This is due to its simplicity, lifting capabilities and cost reduction during mobilisation at a new site or location.
 2.5 TETHER MANAGEMENT SYSTEM (TMS)
2.5 TETHER MANAGEMENT SYSTEM (TMS)
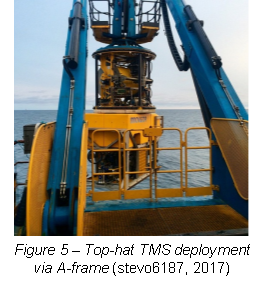
During under water operations the OMP can work either free swimming or via a TMS. Free swimming operations are directly connected to the ROV transmitting electrical power, mechanical payloads and optical signal by means of a tether during operations. A TMS configuration includes the use of a side entry garage or a Top-hat connection where the topside umbilical is connected and then redistributes the power and signals to the ROV via a tethered connection.
During this operation at the Frigg Field a Top-hat TMS would be used to guide, control and position the OMP throughout its cutting and removal operations. This is due to strong advantages such as: providing protection to the OMP as it is securely connected during launch and recovery, secure positioning reduces complications at splash zone interaction, the addition of the Top-hat TMS allows for a further working radius from the garage rather than free swimming operations and allowing for greater precision on deployment to the work site.
A typical mission for the OMP varies depending on the level of cutting and removal of foundations during decommissioning operations. Regarding the case study adopted for the Frigg Field the typical mission expected would be as follows:
- Environmental checks would be carried out on the vessel to determine there is safe working conditions for the OMP to operate
- OMP and top-hat configuration would be connected and moved to launch platform of the A-frame
- Final checks of OMP before launch
- Launching and lowering of the OMP (via A-frame) into the water through the splash zone – monitoring tension on the line
- Grounding at operational level of 98m
- Subsea pressure and containment checks then release from top-hat configuration
- Movement towards and interaction with dredging equipment via manipulators
- Dredging work carried out with standalone subsea dredge – on completion the tooling would be removed
- Inspection of pile surfaces to be cut via front mounted cameras
- Interaction with ECT cutting equipment via manipulators
- Attachment of ECT cutting equipment to initial foundations – monitoring workload from visuals
- Interaction with buoyancy sections being used for re-float x4 – interaction, manipulation, fastening and final checks
- Final checks of whole system and foundation structure before final piles are cut
- Attachment of ECT cutting equipment for final cuts x4 – carried out
- Monitoring the floating of the jacket structure and buoyancy module interaction via visuals
- Final checks of the seabed environment and coverage of unburied foundations
- Recovery operations via the top-hat configuration and return to surface
- Checks, assessment and maintenance of the ROV reported
Having selected the OMP for the decommissioning and removal of the DP2 SPJF there are various areas that may cause difficulties during the installation, operating and maintaining the OMP.
4.1 SEA STATES – WAVE AND CURRENTS
In the Frigg field, the average speed of wind between the winter months December to February is about 9.9 m/s. For this wind velocity, waves are most likely to have a maximum height of 2.5m. However, during severe winter storms which occur roughly once per decade in the area, there is a significant possibility of wave average heights from 12.1m and maximum height of 24m. Currents do fluctuate, reliant on the speed and direction of the winds (Total, 2003).
With these environmental considerations in the North Sea it was necessary to choose an ROV with high performance thrusters to aid in station keeping whilst operating. The OMP permits this with four powerful vectored horizontal and four vertical thrusters, which allow the system to move in four directions, vertical, lateral, roll and pitch comfortably with 2,000lbs of thrust available (Oceaneering, 2017).
4.2 LAUNCH AND RECOVERY OPERATIONS
During launch and recovery operations there are expected difficulties such as:
- Large waves and high winds can cause the OMP and Top-hat TMS to swing wildly – potentially impacting the vessel and causing damage to equipment
- Difficult deployment and recovery procedures when there a reduced deck space to accommodate the operation
- On drilling rigs the proximity of the OMP and Top-hat to the vessels hull and thrusters during entry and exit into the splash zone can become complicated
- Deployed extension cables can be required to reach satellite sites where it was not practical or possible to install via the Top-hat TMS
4.3 OPERATIONAL CUTTINGS
Operational drill cuttings can be problematic with the removal of platform foundations due to its chemical makeup and mass surrounding the foundations at the sea bed. With the DP2 platform, 24 wells were drilled in total with an estimated upheaval of  contained in an area of 80m x 120m at a maximum thickness of 20cm. Due to the low toxicity of the drilling mud used the cuttings can be removed and treated (Total, 2003). To combat this the OMP is capable of using a stand-alone 12″ subsea dredge which can manipulate the suction nozzle aiding in the removal of drill cuttings and sediment surrounding the foundations before cutting operations (Oceaneering DTS, 2013).
contained in an area of 80m x 120m at a maximum thickness of 20cm. Due to the low toxicity of the drilling mud used the cuttings can be removed and treated (Total, 2003). To combat this the OMP is capable of using a stand-alone 12″ subsea dredge which can manipulate the suction nozzle aiding in the removal of drill cuttings and sediment surrounding the foundations before cutting operations (Oceaneering DTS, 2013).
5.1 OIL & GAS
 The OMP can be used for different operations in the oil & gas industry such as: inspection, maintenance and repair, installation, workover and control system (IWOCS), surveying, dredging, subsea tie-ins, flow assurance checks, assisting in the removal of subsea productions systems, mooring line servicing, cable laying operations, video servicing, acoustic positioning and BOP intervention. Such operations like these can take place in the deep-water environments up to 3,000m – maximum operational depths of the OMP.
The OMP can be used for different operations in the oil & gas industry such as: inspection, maintenance and repair, installation, workover and control system (IWOCS), surveying, dredging, subsea tie-ins, flow assurance checks, assisting in the removal of subsea productions systems, mooring line servicing, cable laying operations, video servicing, acoustic positioning and BOP intervention. Such operations like these can take place in the deep-water environments up to 3,000m – maximum operational depths of the OMP.
With respect to maintenance, repair and installation operations, the OMP has the capacity of transferring hot tap fittings, pipeline clamps, misalignment ball connectors, swivel-ring flanges, breakaway joints, riser connections and other equipment for delivery, repair and installation.
Trenching & burial of pipes and cables are operations that are carried out by ROVs that have 200hp and above. The OMP can be considered for these types of laying and burial operations due to its classification and built in features (Oceaneering, 2017).
One of the challenges facing operations in the offshore wind farm environment is observation and maintenance of fixed foundation based, cable monitoring, structural integrity checks and seabed surveys, the OMP is well suited to address these issues due to its comprehensive build, mostly in winter and less visible conditions (UnderwaterVision, 2017).
5.2 FRIGG FIELD VERSATILITY
During the decommissioning operation of the DP2 jacket it became aware that extra preparation in cutting and removal of pile guides was needed to successfully fit and mount the buoyancy cans for removal. A solution to this was that a bespoke diamond wire tool and buoyancy solution was designed for operations to be carried out by ROV. With the OMP this could be successfully carried out due to its adaptability and tooling interaction (Proserv, 2017).
5.3 OCEAN SCIENCE
The OMP can be used for scientific research under water such a sea animal and plants studies in natural environment, Arctic operations, if equipped with various sampling devices. Also, as it is equipped with 3D HD Camera (highly intensity LED) it can operate in extreme environments. Another strong versatile function is that it could be used for underwater interactions – documentaries, filmmaking, archaeology projects, e.g. “Mystery Mardi Gras shipwreck” (Landis, 2017).
5.3 MILITARY
The Millennium Plus vehicle optional power/ data interfaces (Ethernet/optical fibre) and other features built in it can be used for naval/military operation, primarily for mine hunting and mine breaking. Neutralizing and retrieving of explosives, moored mines and also inspection tasks like meteorology, detection of environmental hazard, port security, mine countermeasure and maritime intelligence.
5.4 FISHERIES AND AQUACULTURE
The over exploitation of the North Sea remains a highly-discussed topic to date – to combat this there has been a growing market for offshore fish farms. A typical mission would involve the OMP to either help install or inspect and monitor fish inside, inspect netting/cages that have been used for containment. The manipulator operability would allow for heavy cages to be moved into place and fastened securely – whilst clearly visual (R. D. Christ, 2014),
The OMP can perform a widespread range of activities however there is still the possibility for improvements that may be considered for future development and improved efficiency.
6.1 VISUAL
Currently the OMP can be fitted with either: Standard Definition (SD), High Definition (HD) or a 3D HD camera. For improved visibility during decommissioning operations and dredging procedures where the water conditions could be blurred due to sediment, an upgrade to a 4K Ultra HD camera would be beneficial. The light sensitivity and quality of video produced would offer the OMP user a confidence even when the seabed conditions are not clear to operate. The upgraded camera can be fitted with some more technical specifications such as noise reduction, a wider area of view and higher contrast. With these camera upgrades, the user will have less misrepresentations and even better situation and spatial awareness.
6.2 POWER OUTPUT – THRUST CAPABILITIES
Improving the hydraulic power units on board to 2 x 125hp would allow for an increase in 300lbs of thrust in the vertical, lateral, forward and reverse directions this would allow for the OMP to: improve its station keeping abilities, be quicker during launch and recovery, manoeuvre heavier standalone tools and extra up thrust would allow the OMP to return to the surface with heavier loads more efficiently.
6.3 MANIPULATORS
 Increasing the manipulators range of motion would allow for more detailed technical operations to be carried out and improve the pilot/ROV interaction. This could be made possible by improving the dual manipulators to have 7 degrees of function and mounting a wrist camera assembly to improve visibility (Oceaneering, 2017). A manipulator that could be considered could be the TITAN 4 with its 7 degrees of motion, titanium material characteristics to reduce weight and titanium wrist mounted camera to increase visibility (FMC Technologies, 2017).
Increasing the manipulators range of motion would allow for more detailed technical operations to be carried out and improve the pilot/ROV interaction. This could be made possible by improving the dual manipulators to have 7 degrees of function and mounting a wrist camera assembly to improve visibility (Oceaneering, 2017). A manipulator that could be considered could be the TITAN 4 with its 7 degrees of motion, titanium material characteristics to reduce weight and titanium wrist mounted camera to increase visibility (FMC Technologies, 2017).
Decom North Sea, 2014. Decommissioning in the North Sea – Review of Decommissioning Capacity, s.l.: Decom North Sea.
FMC Technologies, 2017. http://www.f-e-t.com. [Online]
Available at: http://www.f-e-t.com/images/uploads/Schilling_Titan_4_with_Spares_Kit.pdf
[Accessed 4 March 2017].
Landis, N., 2017. Naultilus Productions. [Online]
Available at: http://nautilusproductions.com/projects/mystery-mardi-gras-shipwreck-documentary
[Accessed 4 March 2017].
Oceaneering DTS, 2013. DTS Tooling. [Online]
Available at: http://www.oceaneering.com/oceandocuments/brochures/subseaproducts/Oceaneering-DTS-Catalog-2013.pdf
[Accessed 4 March 2017].
Oceaneering, 2017. http://www.oceaneering.com. [Online]
Available at: http://www.oceaneering.com/oceandocuments/brochures/rov/ROV%20-%20Nexxus.pdf
[Accessed 4 March 2017].
Oceaneering, 2017. Millennium Plus – 220hp heavy work class ROV. [Online]
Available at: http://www.oceaneering.com/oceandocuments/brochures/rov/ROV%20-%20Millennium%20Plus.pdf
[Accessed 4 March 2017].
offshore Energy Today, 2012. http://www.offshoreenergytoday.com. [Online]
Available at: http://www.offshoreenergytoday.com/tag/ocean-installer/page/2/
[Accessed 10 March 2017].
Offshore-mag, 2000. Offshore-mag.com. [Online]
Available at: http://www.offshore-mag.com/articles/print/volume-60/issue-8/news/two-part-kvitebjoslashrn-jacket-will-break-north-sea-water-depth-record.html
[Accessed 19 Feb 2017].
Oil & Gas UK, 2012. Oil & Gas UK – The Decommissioning of Steel Piled Jackets In the North Sea Region, s.l.: Oil & Gas UK.
Proserv, 2017. http://www.proserv.com. [Online]
Available at: http://www.proserv.com/media/case-studies/decommissioning/frigg-field/
[Accessed 4 March 2017].
R. D. Christ, R. L. W., 2014. The ROV Manual – A User Guide for Remotely Operated Vehicles. 2nd ed. Waltham: Elsevier.
stevo6187, 2017. imagala.com. [Online]
Available at: http://www.imagala.com/post/1X5SEdD4ZD
[Accessed 4 March 2017].
T Gram, R. K. J. K. M. J. E. K. C. H. A. S., 2011. Decommissioning of Frigg and MCP01 – A Contractor View. Offshore Technology Conference, Volume 21708.
Total, 2003. Frigg Field Cessation Plan, Stravanger: Total.
Total, 2011. Frigg Field Cessation Plan Close Out Report, s.l.: Total.
UnderwaterVision, 2017. Underwater Vision. [Online]
Available at: http://www.underwatervision.co.uk/services/wind-farms-and-offshore/
[Accessed 4 March 2017].
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


DMCA / Removal Request
If you are the original writer of this essay and no longer wish to have your work published on UKEssays.com then please click the following link to email our support team:
Request essay removal