Automated Mobility Support System for Bedridden People
| ✅ Paper Type: Free Essay | ✅ Subject: Engineering |
| ✅ Wordcount: 2067 words | ✅ Published: 31 Aug 2017 |
Abstract – The proposed research is to provide better service for the patients, kids and aged people. It consists of a trolley provided with DC Geared Motors which is controlled through Android App or Voice Command. The trolley is sent and received where it is utilized by providing the needy by medicine, food and other supplies. This makes the aged one or the needy partially independent, still there must be a person to place the supplies on the trolley. The project is built with Controller, Bluetooth module and a suitable Android App. There’s a fixed time in wait of service, the trolley will return back in the travelled path. The heart of the proposed work is controller which controls the geared DC motors through motor driver. The atmospheric condition of the patient room may be monitored by Smart Bluetooth sensor kit. The components used here are simple and easily available which promote easier construction and design. This design can also be used in hospitals that makes the people independent to get the needs of patient time to time.
Keywords – Smart Trolley, Patients, Controller, Smart Bluetooth Kit, Atmospheric Condition
- Introduction
The main objective of the project is to serve bedridden people who are completely dependent on their care-taker. Now a days there are many home care centres where nurses or some care taker are sent to the needy by hiring them. Usually these home care centres are not afforded by all the people as it becomes a little costlier. This research provides an opportunity for the person who in need of medication, food and other supplies time to time on the daily basis making them partially independent by reducing the work load of the care taker. As it comes to a daily basis system, the person knows well about the time of the medication and other required supplies for them and accesses the device by using various option provided by automated mobility system. Sometimes it becomes difficult for the care takers who is one of the family member mostly to provide service in their work busy or they tend to forget to provide medicines, in such cases this automated mobility system helps the care taker to serve the needy.
This Automated mobility system is very easy to access providing options like operation through arrow keys, buttons, accelerometers and voice control. It is provided with an open source application where one can easily make use of the device. The Automated Mobility System consists of a trolley which is the main equipment used for serving the bedridden people or the needy. It can also be used to serve old people having difficulties. The device is operated through an app which is connected to the equipment through Bluetooth. The trolley has three wheels where the rear wheels are operated using motor and the front wheel is a caster wheel for smooth turning. The trolley is sent from one place to another which is a predefined path. On reaching the destination alerts the care taker for the supply. There is enough time provided at the destination to place the supplements on the trolley and the trolley comes back the original place that is to the patient or to the needy. The time taken to travel and the halt time are predefined. There can be as many different paths to travel say room-1, room-2 and so on. The trolley is also provided with shelf where the frequent requirements are also kept. Being easy to operate by all age people with various option provided it is adapted easily and bought into use. The whole equipment is a single trolley device and an app in your phone or tablet.
1.1. Objective
The proposed project is designed to provide better service for the patients, kids and aged people. It consists of a trolley provided with DC Geared Motors which is controlled through Android App or Voice Command. The trolley is sent and received where it is utilized by providing the needy by medicine, food and other supplies. This makes the aged one or the needy partially independent, still there must be a person to place the supplies on the trolley.
2. System Analysis
2.1. Existing System
In present situation, the nurses from the care centre provide medicines and food for the aged or bedridden people. It is not sure that the medicines are going to them on time. If in some emergency cases, the nurses will forgot to give the medicines. In some cases like if the bedridden people needs some water or something else immediately they cannot call the nurses at that instance. Some people doesn’t prefer these care centre due to insecurity.

Fig. 1. Trolley without Automated Mobility
2.2 Problem Statement
The objective of this project is to help the aged and disabled to carry out their chores. This uplifts their courage to work on their own; while reducing the workload of the caretaker simultaneously. In a manner, it turns out to be more efficient for the people under life term medication, as it can deliver their medicines on time and at regular intervals. We provide the model to serve them better and providing 24×7 monitoring in special wards by also supporting the caretaker with the needs to help the needy.
2.3. Proposed System
2.3.1 Block Diagram
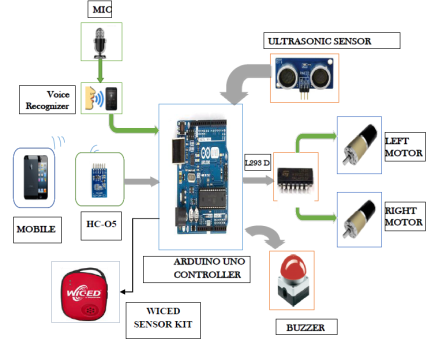
Fig. 2. Block Diagram of Proposed System
3. System Implementation
3.1 Hardware
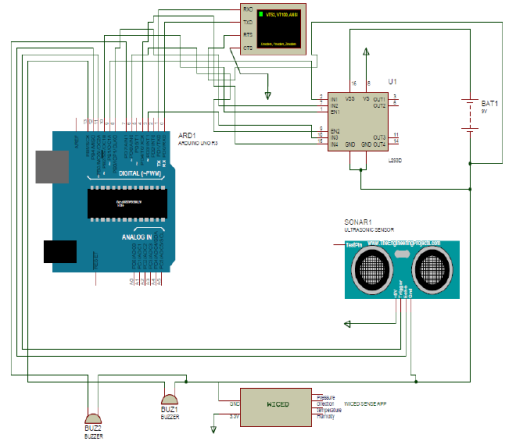
Fig. 3. Circuit Diagram
The main components of automated mobility system are Arduino board, Bluetooth module, and couple of buzzer, L293 motor driver and ultrasonic sensor. These components are drive using 12volt battery. The device is switched on with the help of a power button provided in the trolley. The device is connected to a phone or a tablet through Bluetooth. The options provided in the application are accelerometer, button, arrow key and voice command. When the application is operated, Bluetooth module HC05 has a transmitter and receiver port. The transmitter of the Bluetooth module is connected to the receiver of Arduino. Once the Arduino receives the command, it processes and the output is sent to L239D and the motors are driven accordingly. In addition to that a couple of buzzers are connected to Arduino. One is for the indication for the reach of destination and another in the case of any obstacles in the travelling path of the trolley. To provide an additional information like pressure, temperature, humidity of the room and the direction of the trolley the WICED smart Bluetooth sensor is used. The travelling path of the trolley is are fixed one where the adjustments are done with the time taken for the rotations of the motor.
Say for instance the operator or the person in need of supplies as pressed 1 the app, this command is received by the module HC05 and is transmit the command to the Arduino indicating that the trolley should be sent to the room 1.The Arduino processes the command for L239D to drive the motor. Now the time taken for the motors to drive 5 seconds in forward path and 1 seconds to turn left or right and again travels say 5 seconds to the destination. Once the destination is reached the buzzer1 beeps indicating to provide the necessary. In case of any obstacles in the travelling path the buzzer 2 beeps with the help of the ultrasonic sensor connected to Arduino. The range of the detection of the obstacles say 20cm, 30cm can be programmed in an Arduino platform. The time for the stay of trolley in the destination is also pre-programed and returns to the original place that is to the person who is the bedridden person or the person who operates.
3.2 Software
3.2.1 Arduino Open Source Platform
The Arduino Software (IDE) is open source and it is easy to code and fetch it to the board. Arduino IDE runs on Windows, Mac OS X, and Linux. This software is written in Java language and based on processing and other open source software. This common software may be used for all Arduino development board.
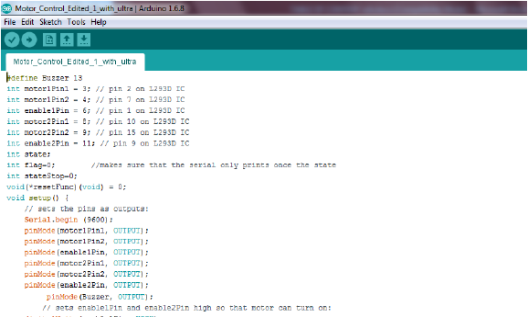
Fig. 4. Arduino Programming Window
The Arduino platform has become quite popular with people just starting out with electronics, and for good reason. Finally, Arduino provides a standard form factor that breaks out the functions of the micro-controller into a more accessible package.
3.2.2 Android Application
In this project we use an open source android application named as “ARDUINO BLUECONTROL” application. This will connect to the Bluetooth module HC05 and receives the command from the operator. By using this application we can give the commands in four way like accelerometer, voice command, and button and arrow keys. We use these four commands in our project to drive the trolley.

Fig. 5. Android Blue Control App
The right arrow key is used to give the command to the trolley to go room 1, upward arrow key is used for room 2 and the left arrow key to straight. Similarly the other mode of giving command like accelerometer and voice recognizer also used to perform the same operation on the trolley.
3.2.3. Wiced Sense Application
WICED smart Bluetooth sensor is connected with the controller to monitor the pressure, humidity and temperature. The parameters are monitored by WICED Sense Android app which is preinstalled in smart phone.

Fig. 6. WICED Sense App
The WICED sense smart kit is embed with BCM20737S Bluetooth SoC and five microelectronic sensors like gyroscope, accelerometer, e-compass, pressure, humidity and temperature. The Bluetooth kit connects directly to the sensor without any external microprocessor. WICED sense application displays the real-time data from the sensors.
4. Experimental Results
The entire setup is ready. The power button is switched ON provided in the trolley and assuming the number of paths initially is three. On interfacing the device with a smart phone using the bluetooth module HC-05 one can make use of the trolley or device. Three different cases are explained below.
CASE 1: ROOM 1
When the operator instructs the device to travel to the room 1, the Bluetooth module receives the command and is send to Arduino for the further processing. Now the device ie trolley is ready to go to room 1.Both the motors rotate say 10 sec in forward direction and turns left keeping a motor without drive and again further proceeds for 10 sec reaching the destination. It remains or alerts the care taker by drawing the attention with beep produced by the buzzer. The buzzer sound is turned off after 5 sec and the trolley returned to the original position in the same travelled path.


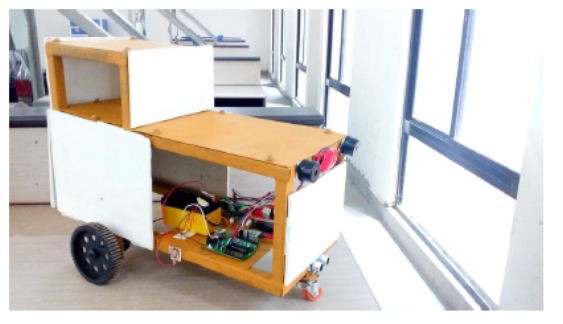
Fig. 7. Proposed Working Model
CASE 2: ROOM 2
When the operator instructs the device to travel to the room 2, the Bluetooth module receives the command and is send to Arduino for the further processing. Now the device i.e trolley is ready to go to room 2. Both the motors rotate say 15 sec in forward direction reaching the destination. It remains or alerts the care taker by drawing the attention with beep produced by the buzzer. The buzzer sound is turned off after 5 sec and the trolley returned to the original position in the same travelled path.
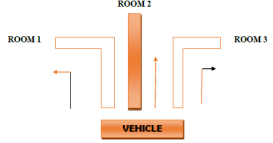
Fig. 7. Predefined Path
CASE 3: ROOM 3
When the operator instructs the device to travel to the room 3, the Bluetooth module receives the command and is send to Arduino for the further processing. Now the device i.e trolley is ready to go to room 3.Both the motors rotate say 10 sec in forward direction and turns right keeping a motor without drive and again further proceeds for 10 sec reaching the destination. It remains or alerts the care taker by drawing the attention with beep produced by the buzzer. The buzzer sound is turned off after 5 sec and the trolley returned to the original position in the same travelled path.
5. Conclusion
Using simple components available in the market, it is possible to invent new technologies. The developed product is to serving the need in both economic and efficient way for needy. It is similar to one serving the needy. Here developed a trolley travelling over all places of the house carrying supplies say food, medicines and other requirement from one place to another place. Keeping in mind to serve the needy in user friendly manner, a simple android application is used. This design can also be used in hospitals that makes the people independent to get the needs of patient time to time.
References
- http://www.jbtc-agv.com/en/Solutions/Industries/Hospital
- http://www.materialshandling.com.au/products/automated-guided-vehicles-agv-healthcare-facilities/
- http://www.roboticautomation.com.au/agvs/hospital-agvs
- https://www.arduino.cc/
- http://www.mouser.com/new/broadcom/broadcom-bcm9wiced-sense/#tabs-2
< >
Cite This Work
To export a reference to this article please select a referencing stye below:
Related Services
View all


DMCA / Removal Request
If you are the original writer of this essay and no longer wish to have your work published on UKEssays.com then please click the following link to email our support team:
Request essay removal